Przestrzeń afiniczna
 | Ten artykuł dotyczy struktury algebraicznej. Zobacz też: przestrzeń afiniczna w ujęciu geometrii syntetycznej. |
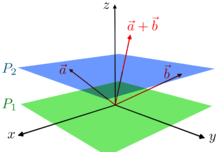









Przestrzeń afiniczna – abstrakcyjna struktura uogólniająca te własności przestrzeni euklidesowych, które są niezależne od pojęć odległości i kąta. W przestrzeniach afinicznych można odejmować punkty by wyznaczyć wektory, oraz przesuwać punkt o wektor, tzn. dodawać wektory do punktu. W szczególności nie ma wyróżnionego punktu, który mógłby służyć za początek. Jednowymiarowa przestrzeń afiniczna nazywana jest prostą afiniczną, a dwuwymiarowa – płaszczyzną afiniczną.
Przestrzeń afiniczna może być postrzegana jako „krok pośredni” między przestrzenią euklidesową a przestrzenią rzutową. Przestrzeń opisywana w teoriach fizycznych (w wielu nierelatywistycznych ujęciach) jest nie tylko afiniczna, ale posiada również strukturę metryczną, a w szczególności konforemną. W ogólności jednak przestrzeń afiniczna nie musi mieć struktury metrycznej ani konforemnej.
Wprowadzenie geometryczne
 Zobacz też: geometria afiniczna.
Zobacz też: geometria afiniczna.

Pojęcie przestrzeni afinicznej pojawiło się w związku z odkryciami geometrii nieeuklidesowych (różniących się od geometrii euklidesowej aksjomatem równoległości). Zakwestionowanie pojęć długości i kąta, które opierają są na pojęciu odległości, doprowadziło do przedefiniowania przestrzeni euklidesowej poprzez usunięcie z definicji wspomnianych pojęć i powiązanych z nimi elementów. Wynikiem tego było powstanie geometrii afinicznej, w której struktura algebraiczna przestrzeni okazała się mieć własności podobne do przestrzeni liniowej (ta ostatnia została zdefiniowana później, dając początek algebrze liniowej).
W geometrii syntetycznej przestrzeń afiniczna definiowana jest jako struktura składająca się z:
- zbioru punktów,
- zbioru prostych,
- relacji incydencji wskazującej relację przynależności punktów względem prostych,
- relacji równoległości mówiącej o tym, które proste są równoległe;
tak, że spełniony jest pewien zestaw aksjomatów, w tym sławny aksjomat równoległości Euklidesa.
Zgodnie z duchem programu erlangeńskiego Feliksa Kleina geometria afiniczna może być określona jako zachowująca niezmienniki przekształceń afinicznych (pokrewieństw, powinowactw).
Niżej przedstawiony jest opis abstrakcyjnej przestrzeni afinicznej wykorzystujący metody algebry liniowej.
Definicja
Niech będzie ustalonym zbiorem. Niech będzie przestrzenią liniową nad ustalonym ciałem.


Elementy zbioru nazywa się punktami i zapisuje pismem prostym (np. ).

Elementy zbioru nazywa się wektorami i zapisuje pismem półgrubym (np. ).

Elementy ciała nazywa się skalarami i zapisuje pismem pochyłym (np. ).

Definicja 1
Przestrzenią afiniczną nazywa się parę wyposażoną w działanie


spełniające aksjomaty:
- dla dowolnego oraz
- dla każdego
- dla dowolnych istnieje tylko jeden wektor taki, że








Wektor łączący punkty oraz (w podanej kolejności) z aksjomatu 3 oznacza się symbolem lub zapisuje w postaci





Przestrzeń nazywa się przestrzenią liniową stowarzyszoną z daną przestrzenią afiniczną lub przestrzenią wektorów swobodnych. Wymiarem przestrzeni afinicznej nazywa się wymiar przestrzeni liniowej

Definicja 2
Równoważnie przestrzeń afiniczną można określić za pomocą działania odwrotnego (względem ustalonego punktu ) do określonego w definicji,

które dla ustalonego jest bijekcją postaci


i w której dla dowolnych zachodzi


Struktura afiniczna przestrzeni liniowej
Z każdą przestrzenią liniową jest związana przestrzeń afiniczna, o ile przyjmie się wtedy termin punkt zastępuje się zwykle całkowicie terminem wektor. Działanie dodawania wektorów do punktów określa się wówczas jako dodawanie elementów przestrzeni



Zgodnie z definicją równoważną, w której dwóm punktom przypisuje się wektor, przestrzeń liniową można przekształcić w afiniczną dodając do niej działanie

Tłumaczy ono pochodzenie notacji korzystającej z odejmowania punktów w pierwszej definicji przestrzeni afinicznej. Na ogół bada się przestrzenie afiniczne skończonego wymiaru.
Baza i niezależność
Układem współrzędnych afinicznych bądź bazowym lub krótko: bazą przestrzeni afinicznej skończonego wymiaru nazywa się ciąg gdzie jest ustalonym punktem ze zbioru nazywanym punktem bazowym lub początkiem układu, a jest bazą przestrzeni Współrzędne punktu to współrzędne wektora względem bazy





Układ punktów nazywa się afinicznie lub punktowo niezależnym, jeżeli wektory są liniowo niezależne. W ten sposób punktów przestrzeni afinicznej rozpina -wymiarową przestrzeń liniową.




Dla każdego wektory stanowią układ liniowo niezależny. O ile dany punkt daje się zapisać jako kombinację afiniczną układu afinicznie niezależnego, to można to zrobić w dokładnie jeden sposób (współrzędne jednoznacznie identyfikują punkt względem takiego układu).


Podprzestrzeń afiniczna
Podprzestrzenią afiniczną przestrzeni afinicznej nazywa się parę taką, że jest podprzestrzenią liniową a jest niepustym podzbiorem która sama jest przestrzenią afiniczną. Oznacza to, że dla określonej wyżej spełnione są warunki:





- dla wszystkich
- dla wszystkich




Tak jak przestrzeń afiniczną, jej podprzestrzeń opisuje się za pomocą pierwszego elementu pary. Przestrzeń jest w tym wypadku jednoznacznie wyznaczona przez zbiór i nosi nazwę przestrzeni kierunkowej danej podprzestrzeni afinicznej.
Przestrzeń euklidesowa
- Osobny artykuł: przestrzeń euklidesowa.
Przestrzeń nad ciałem liczb rzeczywistych nazywa się przestrzenią euklidesową, jeżeli jest przestrzenią skończenie wymiarową wyposażoną w iloczyn skalarny Iloczyn skalarny wyznacza metrykę


- gdzie


Dodatkowo określa się odległość między podprzestrzeniami wzorem


Kąt między podprzestrzeniami definiuje się jako kąt między ich przestrzeniami kierunkowymi. Te, które tworzą ze sobą kąt prosty nazywa się prostopadłymi (ortogonalnymi).
Uogólnienia
Dość zwięzłą definicją przestrzeni afinicznej jest następująca jej charakteryzacja: przestrzeń afiniczna to zbiór punktów z działającą na nim regularnie (równoważnie: ściśle przechodnio albo przechodnio w sposób wolny) grupą addytywną przestrzeni liniowej nad ciałem Przestrzeń afiniczną można określić analogicznie poprzez zastąpienie przestrzeni liniowej modułem.

Zobacz też
- geometria afiniczna
- grupa afiniczna
- przekształcenie afiniczne
- przestrzeń rzutowa
Linki zewnętrzne
 Affine space (ang.), Encyclopedia of Mathematics, encyclopediaofmath.org, [dostęp 2023-06-18].
Affine space (ang.), Encyclopedia of Mathematics, encyclopediaofmath.org, [dostęp 2023-06-18].
- p
- d
- e
| Wektory i działania na nich | |
|---|---|
| Układy wektorów i ich macierze | |
| Wyznaczniki i miara układu wektorów | |
| Przestrzenie liniowe | |
| Odwzorowania liniowe i ich macierze |
|
| Diagonalizacja | |
| Iloczyny skalarne | |
| Pojęcia zaawansowane | |
| Pozostałe pojęcia |
|
| Powiązane dyscypliny | |
| Znani uczeni |

Kontrola autorytatywna (przestrzeń):
- NKC: ph118276
- Universalis: espace-et-repere-affines









